ОГЭ 2022 по физике ›
1. Твёрдые тела под действием силы способны изменять свои форму и (или) объём. Взяв за концы металлическую линейку, можно её согнуть. Если перестать прикладывать силу, то линейка восстановит свою форму. Если сжать пружину (рис. 35), то она сократится, т.е. деформируется. При прекращении действия силы пружина вернётся в первоначальное состояние.
Изменение формы или объёма тела при действии на него силы называется деформацией.
Если длина пружины в недеформированном состоянии \( l_0 \), а после растяжения \( l \), то изменение её длины \( l=l-l_0=x \), где \( l \) или \( x \) – удлинение или деформация.
2. При деформации в теле возникает сила упругости, которая стремится вернуть его в первоначальное состояние. Сила упругости \( (\vec{F}_{упр}) \) — сила, возникающая в теле в результате деформации, стремящаяся вернуть тело в первоначальное состояние и направленная в сторону, противоположную деформации (удлинению).
Так, при растяжении пружины эта сила направлена влево к положению равновесия, при сжатии пружины сила упругости направлена вправо (рис. 36).
Если тело после прекращения действия силы принимает первоначальную форму, то деформация является упругой. Если тело после прекращения действия силы не принимает первоначальную форму, то деформация является неупругой или пластической.
3. При малых деформациях сила упругости прямо пропорциональна удлинению. Поскольку сила упругости и деформация направлены в противоположные стороны, то: \( F_{упр}=-k\Delta l \), где \( k \) — коэффициент пропорциональности, называемый жёсткостью тела. Жёсткость зависит от размеров тела, его формы, материала, из которого сделано тело.
Единица жесткости \( [\,k\,]=\frac{[\,F\,]}{[\,\Delta l\,]} \); \( [\,k\,]=\frac{1\,Н}{1\,м}=1\frac{Н}{м} \).
Формула \( F_{упр}=-k\Delta l \) выражает закон Гука: сила упругости, возникающая при деформации тела, прямо пропорциональна удлинению (деформации) тела и направлена в сторону, противоположную деформации.
Важно понимать, что закон Гука справедлив при малых деформациях.
На рисунке 37 приведён график зависимости модуля силы упругости от деформации. Поскольку эта зависимость линейная, то графиком зависимости является прямая, проходящая через начало координат и составляющая угол \( \alpha \) с осью абсцисс. По графику можно определить жёсткость тела. Например, значению деформации 2 см соответствует сила упругости 4 Н. Разделив 4 Н на 0,02 м, получим \( k \) = 200 Н/м. В треугольнике АОВ жёсткость \( k \) равна тангенсу угла \( \alpha \): \( k=\mathrm{tg}\alpha \).
4. Существуют разные виды деформации: растяжения, сжатия, сдвига, изгиба и кручения. В рассмотренных примерах линейка подвергалась деформации изгиба, пружина — деформации растяжения и сжатия, винты, гайки, болты при закручивании испытывают деформацию кручения, тяжёлые предметы при перемещении по полу — деформацию сдвига.
5. Предположим, что на полу стоит ящик (рис. 38). На него действует сила тяжести \( \vec{F}_т \), направленная вертикально вниз. Ящик, взаимодействуя с полом, деформирует его и деформируется сам. И на ящик, и на пол действует сила упругости, характеризующая их взаимодействие. Сила упругости \( \vec{N} \), действующая на ящик со стороны пола, приложена к ящику и направлена вертикально вверх; сила упругости \( \vec{P} \), действующая со стороны ящика на пол, приложена к полу и направлена вертикально вниз. Эта сила называется весом тела.
Весом тела называют силу, с которой тело, вследствие его притяжения к Земле, действует на опору или подвес. В отличие от силы тяжести, вес тела приложен не к телу, а к опоре или к подвесу. Вес — это сила упругости.
6. Если тело покоится или движется равномерно и прямолинейно, вес тела численно равен силе тяжести, действующей на него: \( \vec{P}=m\vec{g} \).
На тело, движущееся вместе с платформой или подвесом вертикально вниз с ускорением \( \vec{a} \), направленным в сторону движения, действуют сила тяжести \( \vec{F}_{т} \) и сила упругости \( N \) со стороны опоры или подвеса (рис. 39, 40).
Второй закон Ньютона для этой ситуации: \( m\vec{g}+\vec{N}=m\vec{a} \). В проекциях на координатную ось: \( mg-N=ma \) или \( N=mg-ma \). Поскольку \( N=P \), \( P = m(g — a) \).
Если тело движется вниз вместе с опорой или подвесом с ускорением, направленным так же, как и ускорение свободного падения, то его вес меньше силы тяжести, т.е. меньше веса покоящегося тела. Если ускорение тела равно ускорению свободного падения \( \vec{a}=\vec{g} \), то тело находится в состоянии невесомости.
В таком состоянии находится космонавт в космическом корабле, прыгун с трамплина во время полёта вниз.
7. На тело, движущееся вместе с платформой или подвесом вертикально вверх с ускорением \( \vec{a} \), направленным в сторону движения, действуют сила тяжести \( \vec{F}_т \) и сила упругости \( \vec{N} \) со стороны опоры или подвеса (рис. 40).
Второй закон Ньютона для этой ситуации: \( m\vec{g}+\vec{N}=m\vec{a} \). В проекциях на координатную ось: \( mg-N=-ma \) или \( N=mg+ma \). Поскольку \( N=P \), \( P=m(g+a) \).
Таким образом, если тело движется вверх вместе с опорой или подвесом с ускорением, направленным противоположно ускорению свободного падения, то его вес больше силы тяжести, т.е. больше веса покоящегося тела. Увеличение веса тела при движении с ускорением называют перегрузкой. Перегрузки испытывают космонавт в космическом корабле, пилот реактивного самолёта при взлёте и посадке.
Виды деформации
Деформация – это изменение формы, или размеров тела.
Есть несколько видов деформации:
- сдвиг;
- кручение;
- изгиб;
- сжатие/растяжение;
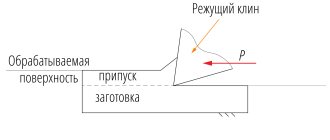
Деформация сдвига возникает, когда одни части тела сдвигаются относительно других его частей. Если подействовать на верхнюю часть картонного ящика, наполненного различными предметами, горизонтальной силой, то вызовем сдвиг верхней части ящика относительно его нижней части.
Сжатие или растяжение легко представить на примере прямоугольного куска тонкой резины. Такая деформация используется, к примеру, в резинках для одежды.
Примеры изгиба и кручения показаны на рисунке 1. Пластиковая линейка, деформированная изгибом, представлена на рис. 1а, а на рисунке 1б – эта же линейка, деформируемая кручением.
Рис. 1. пластиковая линейка, деформированная изгибом – а) и кручением – б)
В деформируемом теле возникают силы, имеющие электромагнитную природу и препятствующие деформации.
Остаточная деформация
Остаточная деформация возникает при действии внешних сил за пределом упругости.
Определение 2
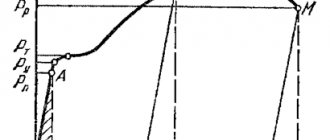
Величина механического напряжения, когда возникает заметная остаточная деформация, называется предел текучести \(στ\).
При дальнейшем возрастании воздействия внешней силы степень деформации растет без увеличения напряжения до величины предела прочности \(σp\), при котором тело разрушается. При графическом изображении возвращения тела к первоначальным параметрам, промежуток между точками \(στ\) и σp будет называться областью текучести или областью пластической деформации. В соответствии с размером данной области материалы делят на вязкие и хрупкие. Для хрупких материалов область текучести значительно меньше, чем для вязких.
Растяжение пружины
Рассмотрим подробнее деформацию растяжения на примере пружины.
Давайте прикрепим пружину к некоторой поверхности (рис. 2). На рисунке слева указана начальная длина \(L_{0}\) пружины.
Рис. 2. Сравнивая длину свободной пружины с длиной нагруженной, можно найти ее удлинение
Подвесим теперь к пружине груз. Пружина будет иметь длину \(L\), указанную на рисунке справа.
Сравним длину нагруженной пружины с длиной свободно висящей пружины.
\[ \large L_{0} + \Delta L = L \]
Найдем разницу (разность) между длинами свободно висящей пружины и пружины с грузом. Вычтем для этого из обеих частей этого уравнения величину \(L_{0}\).
\[ \large \boxed{ \Delta L = L — L_{0} }\]
\( L_{0} \left(\text{м} \right) \) – начальная длина пружины;
\( L \left(\text{м} \right) \) – конечная длина растянутой пружины;
\( \Delta L \left(\text{м} \right) \) – кусочек длины, на который растянули пружину;
Величину \( \Delta L \) называют удлинением пружины.
Иногда рассчитывают относительное удлинение. Это относительное удлинение часто выражают десятичной дробью. Или дробью, в знаменателе которой находится число 100 — такую дробь называют процентом.
Примечание: Отношение – это дробь. Относительное – значит, дробное.
\[ \large \boxed{ \frac{\Delta L }{ L_{0}} = \frac{ L — L_{0}}{L_{0} } = \varepsilon } \]
\( \varepsilon \) – это отношение (доля) растяжения пружины к ее начальной длине. Измеряют в процентах и называют относительным удлинением.
Расчет силы упругости
Если растягивать пружину вручную, мы можем заметить: чем больше мы растягиваем пружину, тем сильнее она сопротивляется.
Значит, с удлинением пружины связана сила, которая сопротивляется этому удлинению.
Конечно, если пружина окажется достаточно упругой, чтобы сопротивляться. Например, разноцветная пружина-игрушка (рис. 3), изготовленная из пластмассы, сопротивляться растяжению, увеличивающему ее длину в два раза, практически не будет.
Разноцветная пластмассовая пружина-игрушка растяжению сопротивляется слабо
Закон Гука
Английский физик Роберт Гук, живший во второй половине 17-го века, установил, что сила сопротивления пружины и ее удлинение связаны прямой пропорциональностью. Силу, с которой пружина сопротивляется деформации, он назвал \( F_{\text{упр}} \) силой упругости.
\[ \large \boxed{ F_{\text{упр}} = k \cdot \Delta L }\]
Эту формулу назвали законом упругости Гука.
\( F_{\text{упр}} \left( H \right) \) – сила упругости;
\( \Delta L \left(\text{м} \right) \) – удлинение пружины;
\( \displaystyle k \left(\frac{H}{\text{м}} \right) \) – коэффициент жесткости (упругости).
Какие деформации называют малыми
Закон Гука применяют для малых удлинений (деформаций).
Если убрать деформирующую силу и тело вернется к первоначальной форме (размерам), то деформации называют малыми.
Если же тело к первоначальной форме не вернется – малыми деформации назвать не получится.
Как рассчитать коэффициент жесткости
Груз, прикрепленный к концу пружины, растягивает ее (рис. 4). Измерим удлинение пружины и составим силовое уравнение для проекции сил на вертикальную ось. Вес груза направлен против оси, а сила упругости, противодействующая ему – по оси.
Рис. 4. Вес подвешенного на пружине груза уравновешивается силой упругости
Так как силы взаимно компенсируются, в правой части уравнения находится ноль.
\[ \large F_{\text{упр}} — m \cdot g = 0 \]
Подставим в это уравнение выражение для силы упругости
\[ \large k \cdot \Delta L — m \cdot g = 0 \]
Прибавим к обеим частям вес груза и разделим на измеренное изменение длины \(\Delta L \) пружины. Получим выражение для коэффициента жесткости:
\[ \large \boxed{ k = \frac{ m \cdot g }{\Delta L} }\]
\(g\) – ускорение свободного падения, оно связано с силой тяжести.
Закон Гука
Следует отметить, что силы упругости не являются фундаментальными силами, они относятся по своей природе к электромагнитным и, соответственно, описываются приближенными формулами.
Эмпирическим путем было установлено что при небольших деформациях относительное увеличение длины и напряжение пропорциональны между собой:
\(σ=Eε,\)
где E – модуль Юнга. Значение данного коэффициента соответствует удлинению материала на одну единицу. Модуль Юнга измеряют в Ньютонах на квадратный метр, то есть в Паскалях.
В соответствии с законом Юнга удлинение стержня в процессе упругой деформации пропорционально силе действия на стержень:
\(F= {ES\over l}Δl=kΔl,\)
где k является коэффициентом упругости.
Деформацию твердых тел можно описать по закону Гука только до момента достижения предела пропорциональности. Деформация становится нелинейной после достижения предела упругости. То есть, закон Гука применим лишь при упругих деформациях.
Не нашли что искали?
Просто напиши и мы поможем
Соединяем две одинаковые пружины
В задачниках по физике и пособиях для подготовки к ЕГЭ встречаются задачи, в которых одинаковые пружины соединяют последовательно, либо параллельно.
Параллельное соединение пружин
На рисунке 5а представлена свободно висящая пружина. Нагрузим ее (рис. 5б), она растянется на величину \(\Delta L\). Соединим две такие пружины параллельно и подвесим груз в середине перекладины (рис. 5в). Из рисунка видно, что конструкция из двух параллельных пружин под действием груза растянется меньше, нежели единственная такая пружина.
Рис. 5. Две пружины, соединенные параллельно, деформируются меньше одной такой пружины
Сравним растяжение двух одинаковых пружин, соединенных параллельно, с растяжением одной пружины. К пружинам подвешиваем один груз весом \(mg\).
Одна пружина:
\[ \large k_{1} \cdot \Delta L = m \cdot g \]
Две параллельные пружины:
\[ \large k_{\text{параллел}} \cdot \Delta L \cdot \frac{1}{2}= m \cdot g \]
Так как правые части уравнений совпадают, левые части тоже будут равны:
\[ \large k_{\text{параллел}} \cdot \Delta L \cdot \frac{1}{2}= k_{1} \cdot \Delta L \]
Обе части уравнения содержат величину \(\Delta L \). Разделим обе части уравнения на нее:
\[ \large k_{\text{параллел}} \cdot \frac{1}{2}= k_{1} \]
Умножим обе части полученного уравнения на число 2:
\[ \large \boxed{ k_{\text{параллел}} = 2k_{1} } \]
Коэффициент жесткости \(k_{\text{параллел}}\) двух пружин, соединенных параллельно, увеличился вдвое, в сравнении с одной такой пружиной
Последовательное соединение пружин
Рисунок 6а иллюстрирует свободно висящую пружину. Нагруженная пружина (рис. 6б), растянута на длину \(\Delta L\). Теперь возьмем две такие пружины и соединим их последовательно. Подвесим груз к этим (рис. 6в) пружинам.
Практика показывает, что конструкция из двух последовательно соединенных пружин под действием груза растянется больше единственной пружины.
На каждую пружину в цепочке действует вес груза. Под действием веса пружина растягивается и передает далее по цепочке этот вес без изменений. Он растягивает следующую пружину. А та, в свою очередь, растягивается на такую же величину \(\Delta L\).
Примечание: Под действием силы пружина растягивается и передает эту растягивающую силу далее по цепочке без изменений
Рис. 6. Система, состоящая из двух одинаковых пружин, соединенных последовательно, деформируются больше одной пружины
Сравним растяжение двух одинаковых последовательно соединенных пружин и растяжение единственной пружины. В обоих случаях к пружинам подвешиваем одинаковый груз весом \(mg\).
Одна пружина:
\[ \large k_{1} \cdot \Delta L = m \cdot g \]
Две последовательные пружины:
\[ \large k_{\text{послед}} \cdot \Delta L \cdot 2 = m \cdot g \]
Так как правые части уравнений совпадают, левые части тоже будут равны:
\[ \large k_{\text{послед}} \cdot \Delta L \cdot 2 = k_{1} \cdot \Delta L \]
Обе части уравнения содержат величину \(\Delta L \). Разделим обе части уравнения на нее:
\[ \large k_{\text{послед}} \cdot 2 = k_{1} \]
Разделим обе части полученного уравнения на число 2:
\[ \large \boxed{ k_{\text{послед}} = \frac{k_{1}}{2} } \]
Коэффициент жесткости \(k_{\text{послед}}\) двух пружин, соединенных последовательно, уменьшится вдвое, в сравнении с одной такой пружиной
Потенциальная энергия сжатой или растянутой пружины
Пружина сжатая (левая часть рис. 7), или растянутая (правая часть рис. 7) на длину \(\Delta L \) обладает потенциальной возможностью вернуться в первоначальное состояние и при этом совершить работу, например, по перемещению груза. В таких случаях физики говорят, что пружина обладает потенциальной энергией.
Рис. 7. Деформированная — сжатая или растянутая пружина обладает потенциальной энергией
Эта энергия зависит от коэффициента жесткости пружины и от ее удлинения (или укорочения при сжатии).
Чем больше жесткость (упругость) пружины, тем больше ее потенциальная энергия. Увеличив удлинение пружины получим повышение ее потенциальной энергии по квадратичному закону:
\[ \large \boxed{ E_{p} = \frac{k}{2} \cdot \left( \Delta L \right)^{2} }\]
\( E_{p} \left( \text{Дж} \right)\) – потенциальная энергия сжатой или растянутой пружины;
\( \Delta L \left(\text{м} \right) \) – удлинение пружины;
\( \displaystyle k \left(\frac{H}{\text{м}} \right) \) – коэффициент жесткости (упругости) пружины.
Выводы
- Упругие тела – такие, которые сопротивляются деформации;
- Во время деформации в упругих телах возникает сила, она препятствует деформации, ее называют силой упругости;
- Деформация – изменение формы, или размеров тела;
- Есть несколько видов деформации: изгиб, кручение, сдвиг, растяжение/сжатие;
- Удлинение пружины – это разность ее конечной и начальной длин;
- Сжатая или растянутая пружина обладает потенциальной энергией (вообще, любое упруго деформированное тело обладает потенциальной энергией);
- Система, состоящая из нескольких одинаковых пружин, будет иметь коэффициент жесткости, отличный от жесткости единственной пружины;
- Если пружины соединяют параллельно – коэффициент жесткости системы увеличивается;
- А если соединить пружины последовательно – коэффициент жесткости системы уменьшится.
Характеристика упругих сил
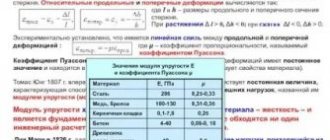
Механическим напряжением является физическая величина, показывающая модуль силы упругости, что действует на единицу площади.
Такое механическое напряжение бывает двух видов, которые отличаются направлениям приложения упругой силы. Это нормальное σ и тангенциальное τ механическое напряжение.
Замечание 1
Количественная мера степени деформации – это относительная деформация.
К примеру, относительное изменение длины стержня описывается таким образом:
\(ε= {Δl \over l}\)
А величина относительного продольного растяжения или сжатия описывается так:
\(ε’= {Δd \over d}\)
где \(l\) – длина;
\(d\) – диаметр стержня.
Эти виды деформаций происходят одновременно, но имеют разные знаки, поскольку во время растяжения длина увеличивается, а диаметр уменьшается. Если же рассматривать процесс сжатия тела, то здесь будет всё наоборот, то есть длина будет уменьшаться, а диаметр увеличиваться. Взаимосвязь этих деформаций можно описать следующим выражением:
\(ε’=-με,\),
где \(μ\) – коэффициент Пуассона, который зависит от характеристик самого материала.