Виды двигателей
Регулятор оборотов с поддержанием мощности — изобретение, которое вдохнет новую жизнь в электроприбор, и он будет работать как только что приобретенный товар. Но стоит помнить о том, что двигатели бывают разных форматов и у каждого своя предельная работа.
Двигатели разные по характеристикам. Это значит то, что та или иная техника работает на разных частотах оборота вала, запускающего механизм. Мотор может быть:
В основном трехфазные электромоторы встречаются на заводах или крупных фабриках. В домашних условиях используются однофазные и двухфазные. Данного электричества хватает на работу бытовой техники.
Регулятор оборотов мощности
Принципы работы
Регулятор оборотов электродвигателя 220 В без потери мощности используется для поддержки первоначальной заданной частоты оборотов вала. Это один из основных принципов данного прибора, который называется частотным регулятором.
С помощью него электроприбор работает в установленной частоте оборотов двигателя и не снижает ее. Также регулятор скорости двигателя влияет на охлаждение и вентиляцию мотора. C помощью мощности устанавливается скорость, которую можно как поднять, так и снизить.
Вопросом о том, как уменьшить обороты электродвигателя 220 В, задавались многие люди. Но данная процедура довольно проста. Стоит только изменить частоту питающего напряжения, что существенно снизит производительность вала мотора. Также можно изменить питание двигателя, задействуя при этом его катушки. Управление электричеством тесно связано с магнитным полем и скольжением электродвигателя. Для таких действий используют в основном автотрансформатор, бытовые регуляторы, которые уменьшают обороты данного механизма. Но стоит также помнить о том, что будет уменьшаться мощность двигателя.
Вращение вала
Двигатели делят на:
Регулятор скорости вращения асинхронного электродвигателя зависит от подключения тока к механизму. Суть работы асинхронного мотора зависит от магнитных катушек, через которые проходит рамка. Она поворачивается на скользящих контактах. И когда при повороте она развернется на 180 градусов, то по данным контактам связь потечет в обратном направлении. Таким образом, вращение останется неизменным. Но при этом действии нужный эффект не будет получен. Он войдет в силу после внесения в механизм пары десятков рамок данного типа.
Коллекторный двигатель используется очень часто. Его работа проста, так как пропускаемый ток проходит напрямую — из-за этого не теряется мощность оборотов электродвигателя, и механизм потребляет меньше электричества.
Двигатель стиральной машины также нуждается в регулировке мощности. Для этого были сделаны специальные платы, которые справляются со своей работой: плата регулировки оборотов двигателя от стиральной машины несет многофункциональное употребление, так как при ее применении снижается напряжение, но не теряется мощность вращения.
Схема данной платы проверена. Стоит только поставить мосты из диодов, подобрав оптрон для светодиода. При этом еще нужно поставить симистор на радиатор. В основном регулировка двигателя начинается от 1000 оборотов.
Если не устраивает регулятор мощности и не хватает его функциональности, можно сделать или усовершенствовать механизм. Для этого нужно учитывать силу тока, которая не должна превышать 70 А, и теплоотдачу при использовании. Поэтому можно установить амперметр для регулировки схемы. Частота будет небольшой и будет определена конденсатором С2.
Далее стоит настроить регулятор и его частоту. При выходе данный импульс будет выходить через двухтактный усилитель на транзисторах. Также можно сделать 2 резистора, которые будут служить выходом для охладительной системы компьютера. Чтобы схема не сгорела, требуется специальный блокиратор, который будет служить удвоенным значением тока. Так данный механизм будет работать долго и в нужном объеме. Регулирующие приборы мощности обеспечат вашим электроприборам долгие годы службы без особых затрат.
При пуске электродвигателя происходит превышение потребления тока в 7 раз, что способствует преждевременному выходу из строя электрической и механической частей мотора. Для предотвращения этого следует применять регулятор оборотов электродвигателя. Существует много моделей заводского плана, но для того чтобы сделать такое устройство самостоятельно, необходимо знать принцип действия электродвигателя и способы регулирования оборотов ротора.
Общие сведения
Электродвигатели переменного тока получили широкое распространение во многих сферах жизнедеятельности человека, а именно — модели асинхронного типа. Основное назначение двигателя как электрической машины — трансформация электрической энергии в механическую. Асинхронный в переводе означает неодновременный, так как частота вращения ротора отличается от частоты переменного напряжения (U) в статоре. Существует две разновидности асинхронных двигателей по типу питания:
Однофазные применяются для домашних бытовых нужд, а трехфазные используются на производстве. В трехфазных асинхронных двигателях (далее ТАД) используются два вида роторов:
- замкнутые;
- фазные.
Замкнутые составляют около 95% от всех применяемых двигателей и обладают значительной мощностью (от 250 Вт и выше). Фазный тип конструктивно отличается от АД, но применяется достаточно редко по сравнению с первым. Ротор представляет собой стальную фигуру цилиндрической формы, которая помещается внутрь статора, причем на его поверхность напрессован сердечник.
Короткозамкнутый и фазный роторы
Впаянные или залитые в поверхность сердечника и накоротко замкнутые с торцов двумя кольцами высокопроводящие медные (для машин большой мощности) или алюминиевые стержни (для машин меньшей мощности) играют роль электромагнитов с полюсами, обращенными к статору. Стержни обмотки не имеют какой-либо изоляции, так как напряжение в такой обмотке нулевое.
Более часто используемый для стержней двигателей средней мощности алюминий отличается малой плотностью и высокой электропроводностью.
Читать также: Как подключить три светильника к одному выключателю
Для уменьшения высших гармоник электродвижущей силы (ЭДС) и исключения пульсации магнитного поля стержни ротора имеют определенным образом рассчитанный угол наклона относительно оси вращения. Если используется электромотор маленькой мощности, то пазы представляют собой закрытые конструкции, которые отделяют ротор от зазора с целью увеличения индуктивной составляющей сопротивления.
Ротор в виде фазного исполнения или типа характеризуются обмоткой, концы ее соединены по типу «звезда» и присоединены к контактным кольцам (на валу), по которым скользят графитовые щетки. Для устранения вихревых токов поверхность обмоток покрывается оксидной пленкой. Кроме того, в цепь обмотки ротора добавляется резистор, позволяющий изменять активное сопротивление (R) роторной цепи для уменьшения значений пусковых токов (Iп). Пусковые токи отрицательно влияют на электрическую и механическую части электромотора. Переменные резисторы, используемые для регулирования Iп:
- Металлические или ступенчатые с ручным переключением.
- Жидкостные (за счет погружения на глубину электродов).
Щетки, выполненные из графита, изнашиваются, и некоторые модели оборудованы короткозамкнутым конструктивным исполнением, которое поднимает щетки и замыкает кольца после запуска мотора. АД с фазным ротором являются более гибкими в плане регулирования Iп.
Конструктивные особенности
Асинхронный двигатель не имеет выраженных полюсов в отличие от электромотора постоянного тока. Число полюсов определяется количеством катушек в обмотках неподвижной части (статор) и способом соединения. В асинхронной машине с 4-мя катушками проходит магнитный поток. Статор выполняется из листов спецстали (электротехническая сталь), сводящих к нулю вихревые токи, при которых происходит значительный нагрев обмоток. Он приводит к массовому межвитковому замыканию.
Железняк или сердечник ротора напрессовывается непосредственно на вал. Между ротором и статором существует минимальный воздушный зазор. Обмотка ротора выполняется в виде «беличьей клетки» и сделана из медных или алюминиевых стержней.
В электромоторах мощностью до 100 кВт применяется алюминий, обладающий незначительной плотностью — для заливки в пазы сердечника ротора. Но несмотря на такое устройство, двигатели этого типа греются. Для решения этой проблемы используются вентиляторы для принудительного охлаждения, которые насаживаются на вал. Эти двигатели просты и надежны. Однако двигатели потребляют при пуске большой ток, в 7 раз больше номинального. Из-за этого они имеют низкий пусковой момент, так как большая часть энергии электричества идет на нагрев обмоток.
Электромоторы, у которых повышенный момент пуска, отличаются от обыкновенных асинхронных конструкцией ротора. Ротор изготавливается в виде двойной «беличьей клетки». Эти модели имеют сходство с фазными типами изготовления ротора. Он состоит из внутренней и наружной «беличьих клеток», причем наружная является пусковой и обладает большим активным и малым реактивным R. Наружная обладает незначительным активным и высоким реактивным R. При увеличении частоты вращения I переключается на внутреннюю клетку и работает в виде короткозамкнутого ротора.
Принцип работы
При протекании I по статорной обмотке в каждой из них создается магнитный поток (Ф). Эти Ф сдвинуты на 120 градусов относительно друг друга. Полученный Ф является вращающимся, создающим электродвижущую силу (ЭДС) в алюминиевых или медных проводниках. В результате этого и создается пусковой магнитный момент электромотора, и ротор начинает вращаться. Этот процесс называется еще в некоторых источниках скольжением (S), показывающим разность частоты n1 электромагнитного поля стартера, которое становится больше, чем частота, полученная при вращении ротора n2. Вычисляется в процентах и имеет вид: S = ((n1-n2)/n1) * 100%.
Значение S при начальном старте электромотора равно примерно 1, но при возрастании значений n2 становится меньше. В этот момент I в роторе уменьшается, следовательно, и ЭДС становится меньше номиналом. При холостом ходе S минимально, но при увеличении момента статического взаимодействия ротора и статора эта величина достигает критического значения. Если выполняется неравенство: S > Sкр, то мотор работает нормально, однако при превышении значения Sкр он может «опрокинуться». Опрокидывание вызывает нестабильную работу, но с течением времени исчезает.
Для чего нужен частотный преобразователь?
Этот вопрос задают множество людей, которым впервые понадобилось подключить трехфазный двигатель насоса или вентилятора. Конечно, любой электродвигатель можно напрямую подключить к сети переменного тока через соответствующую защитную аппаратуру (моторный автоматический выключатель или контактор с тепловым реле).
Насос водяной
Канальный вентилятор
Рассмотрим процессы, происходящие в электродвигателе в момент прямого пуска с помощью автоматического выключателя или кнопки включения контактора на примере обычного трехфазного асинхронного двигателя.
На статорные обмотки электродвигателя подается переменное напряжение, которое генерирует соответствующее электромагнитное поле этих обмоток. Это поле, направленное в сторону ротора, в свою очередь заставляет генерироваться электрический ток в короткозамкнутых витках ротора. Затем ток в обмотках ротора генерирует ответное магнитное поле, которое и приводит к движению ротора относительно статора. Все эти процессы, возникающие в момент пуска, называются процессом намагничивания статора и ротора.
Асинхронный электрический двигатель
Трехфазный электродвигатель сам по себе не нужен: на его валу обязательно присутствует нагрузка (самая простая — в виде лопастей вентилятора). В ситуации с нагруженным конвейером всё сложнее. Тем не менее, у этой нагрузки есть момент инерции – момент, который необходимо преодолеть двигателю для запуска вращения вала. Таким образом, все эти электромагнитные и механические силы в момент пуска напрямую соотносятся с обычным пусковым током двигателя. Как несложно догадаться, этот ток будет в несколько раз (2-7) больше номинального тока двигателя, который получится в установившемся режиме работы.
Скорость вращения электродвигателя или число оборотов в минуту
Скорость вращения вала как асинхронных, так и синхронных электродвигателей определяется частотой вращения магнитного поля статора. Магнитное поле вращается соответственно подаваемому на обмотки статора переменному току по трем фазам. Именно это «вращение» электрического тока в статоре приводит к вращающемуся магнитному полю и определяется по формуле:
n = (60 • f / p) • (1 — s)
где n – номинальное число оборотов вала асинхронного электродвигателя, p – число пар полюсов (см. на паспортной табличке), s – скольжение (разность скоростей поля ротора и поля статора), f – частота переменного тока (например, 50 Гц). Число пар полюсов статора зависит от конструкции катушек статора. Скольжение зависит от нагрузки на валу электродвигателя. Таким образом, подключив электродвигатель к сети переменного тока, мы получим вращение с постоянной скоростью.
Зачем нужно регулировать скорость и как это делается?
Заданное в паспортной табличке число оборотов двигателя на 1 минуту не всегда устраивает потребителя. Иногда скорость механизма хочется уменьшить, а давление в трубе наоборот поднять. Возникает потребность в изменении частоты вращения вала электродвигателя. Как видно из формулы выше, наиболее простой способ изменения частоты вращения вала электродвигателя –изменить частоту переменного тока f.
Шильдик электродвигателя EQPIII Toshiba
Принцип работы частотного преобразователя
Вот тут и приходит на помощь частотный преобразователь, иначе говоря ЧРП (частотно-регулируемый привод). Он, как говорилось в самом начале, позволяет задавать на своем выходе заданные в настройках амплитуду напряжения и частоту переменного тока.
Частота вы выходе может регулироваться в диапазоне 0.01 — 590 Гц если брать инверторы серии AS3 Toshiba. Для серии S15 Toshiba диапазон регулирования находится в пределах 0.01 — 500 Гц. Для серии nC3E Toshiba диапазон регулирования находится в пределах 0.01 — 400 Гц. Это объясняется функциональным назначением разных серий ПЧ.
Напряжение на выходе может изменяться в диапазоне от 0 В до напряжения питания ПЧ, т.е. текущего напряжения на входе частотного преобразователя. Это свойство можно использовать для получения нужного выходного напряжения и частоты, что ценно, например, для испытания стендового оборудования. Правда для этого придется использовать специальный выходной синусный фильтр, чтобы получить чистые синусоидальное напряжение и ток.
С частотой все понятно, но зачем нужно изменять напряжение?
Дело в том, что для поддержания определенного магнитного поля в обмотках статора требуется изменять не только частоту, но и напряжение. Получается, что частота должна соответствовать определенному напряжению. Этот называется законом скалярного управления U/f (V/f), где U или V — напряжение.
Также существует закон векторного регулирования. Векторное регулирование используется для оборудования, где требуется поддерживать необходимый крутящий момент на валу при низких скоростях электродвигателя, высокое быстродействие и точность регулирования частоты вращения. Векторное управление представляет собой математический аппарат в «мозге» частотного преобразователя, который позволяет точно определять угол поворота ротора по токам фаз двигателя.
Использование частотника позволяет убрать большой пусковой ток, достигая таким образом значительного экономического эффекта при частых пусках и остановках электродвигателя.
Схема частотного преобразователя
Ниже представлена типовая схема частотного преобразователя. Входное сетевое трехфазное или однофазное напряжение подается через опциональный входной фильтр на клеммы диодного моста. Неуправляемый диодный (или управляемый тиристорный) мост преобразует переменное напряжение сети в постоянное пульсирующее напряжение. Для фильтрации пульсаций служит звено постоянного тока из одного или нескольких конденсаторов C.
Схема преобразователя частоты
Напряжение в звене постоянного тока после выпрямления трехфазного напряжения будет равно согласно формуле: 380*1,35 = 513 В.
Дроссель DCL в звене постоянного тока позволяет дополнительно сгладить пульсации напряжения после диодного моста и выполняет функции снижения гармоник выпрямителя, инжектируемых в питающую сеть.
Транзисторы T1-T6 инвертора с помощью специального алгоритма системы управления генерируют на клеммы электродвигателя 3 пакета импульсов, разнесенных по трем фазам на 120 градусов во времени. Ни рисунке ниже показана только одна фаза: пачка выходных импульсов широтно-импульсной модуляции (ШИМ), проходя через обмотку электродвигателя, сгладится до формы, напоминающей синусоиду. Частота импульсов ШИМ (опорная частота) в промышленных преобразователях обычно составляет 3-4 кГц, но для ПЧ малой мощности может доходить до 16 кГц. Чем выше частоты ШИМ, тем будет меньше гармонических искажений «синусоиды» на выходе инвертора. Но при этом возрастают тепловые потери на силовых транзисторах, что уменьшает КПД. В ПЧ Toshiba величину частоты можно изменять, регулируя таким образом тепловые потери.
ШИМ инвертора
Выходное напряжение частотного преобразователя будет всегда ниже входного сетевого напряжения. Это связано с потерями в силовом модуле и алгоритме получения ШИМ импульсов.
Между частотным преобразователем и электродвигателем можно установить дополнительный фильтр, позволяющий значительно улучшить форму выходного напряжения после частотника. Это необходимо для того, чтобы импульсы ШИМ не разрушали изоляцию обмоток двигателя и не вызывали перенапряжения на конце длинного кабеля. Подробнее о выходных фильтрах.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Читать также: Как согнуть медную трубу без трубогиба
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2— скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.
На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением
Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.
Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
Недостатки:
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
Слабые стороны:
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Читать также: Расход ацетилена и кислорода при резке металла
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Коллекторные двигатели часто можно встретить в бытовых электроприборах и в электроинструменте: стиральная машина, болгарка, дрель, пылесос и т. д. Что совсем не удивительно, ведь коллекторные двигатели позволяют получать и высокие обороты, и большой крутящий момент (в том числе высокий пусковой момент) — что и нужно для большинства электроинструментов.
При этом коллекторные двигатели могут питаться как постоянным током (в частности – выпрямленным), так и переменным током от бытовой сети. Для управления скоростью вращения ротора коллекторного двигателя применяют регуляторы оборотов, о них и пойдет речь в данной статье.
Для начала вспомним устройство и принцип работы коллекторного двигателя. Коллекторный двигатель включает в себя обязательно следующие части: ротор, статор и щеточно-коллекторный коммутационный узел. Когда питание подается на статор и на ротор, их магнитные поля начинают взаимодействовать, ротор начинает в итоге вращаться.
Питание на ротор подается через графитовые щетки, плотно прилегающие к коллектору (к ламелям коллектора). Для изменения направления вращения ротора, необходимо изменить фазировку напряжения на статоре или на роторе.
Обмотки ротора и статора могут питаться от разных источников или же могут быть соединены параллельно либо последовательно друг с другом. Так различаются коллекторные двигатели параллельного и последовательного возбуждения. Именно коллекторные двигатели последовательного возбуждения можно встретить в большинстве бытовых электроприборов, поскольку такое включение позволяет получить устойчивый к перегрузкам двигатель.
Говоря о регуляторах оборотов, прежде всего остановимся на самой простой тиристорной (симисторной) схеме (смотрите ниже). Данное решение применяется в пылесосах, стиральных машинах, болгарках, и показывает высокую надежность при работе в цепях переменного тока (особенно от бытовой сети).
Работает данная схема достаточно незатейливо: на каждом периоде сетевого напряжения конденсатор заряжается через резистор до напряжения отпирания динистора, присоединенного к управляющему электроду основного ключа (симистора), после чего симистор открывается и пропускает ток к нагрузке (к коллекторному двигателю).
Регулируя время зарядки конденсатора в цепи управления открыванием симистора, регулируют среднюю мощность подаваемую на двигатель, соответственно регулируют обороты. Это простейший регулятор без обратной связи по току.
Симисторная схема похожа на обычный диммер для регулировки яркости ламп накаливания, обратной связи в ней нет. Чтобы появилась обратная связь по току, например чтобы удерживать приемлемую мощность и не допускать перегрузок, необходима дополнительная электроника. Но если рассмотреть варианты из простых и незатейлевых схем, то за симисторной схемой следует реостатная схема.
Реостатная схема позволяет эффективно регулировать обороты, но приводит к рассеиванию большого количества тепла. Здесь требуется радиатор и эффективный отвод тепла, а это потери энергии и низкий КПД в итоге.
Более эффективны схемы регуляторов на специальных схемах управления тиристором или хотя бы на интегральном таймере. Коммутация нагрузки (коллекторного двигателя) на переменном токе осуществляется силовым транзистором (или тиристором), который открывается и закрывается один или несколько раз в течение каждого периода сетевой синусоиды. Так регулируется средняя мощность, подаваемая на двигатель.
Схема управления питается от 12 вольт постоянного напряжения от собственного источника или от сети 220 вольт через гасящую цепь. Такие схемы подходят для управления мощными двигателями.
Принцип регулирования с микросхемами на постоянном токе — это конечно ШИМ — широтно-импульсная модуляция. Транзистор, например, открывается с строго заданной частотой в несколько килогрец, но длительность открытого состояния регулируется. Так, вращая ручку переменного резистора, устанавливают скорость вращения ротора коллекторного двигателя. Данный метод удобен для удержания малых оборотов коллекторного двигателя под нагрузкой.
Более качественное управление — именно регулировка по постоянному току. Когда ШИМ работает на частоте порядка 15 кГц, регулируя ширину импульсов, управляют напряжением при примерно одном и том же токе. Скажем, регулируя постоянное напряжение в диапазоне от 10 до 30 вольт, получают разные обороты при токе порядка 80 ампер, добиваясь требуемой средней мощности.
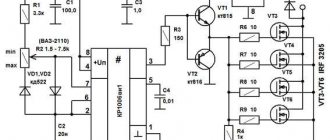
Регулятор оборотов коллекторного двигателя на TDA1085:
Если вы хотите изготовить простой регулятор для коллекторного двигателя своими руками без особых запросов к обратной связи, то можно выбрать схему на тиристоре. Потребуется лишь паяльник, конденсатор, динистор, тиристор, пара резисторов и провода.
Если же нужен более качественный регулятор с возможностью поддержания устойчивых оборотов при нагрузке динамического характера, присмотритесь к регуляторам на микросхемах с обратной связью, способным обрабатывать сигнал с тахогенератора (датчика скорости) коллекторного мотора, как это реализовано например в стиральных машинах.