Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Вывод
При подаче напряжения у асинхронных моделей моторов наблюдаются рывки ротора. Это явление негативно влияет на работу, как самого агрегата, так и его привода. Именно поэтому, регулировка осуществляется по принципу плавного старта. Он обеспечивается такими факторами:
- старт посредством ЛАТР;
- разгон и работу мотора путем переключения обмоток по схемам треугольник/звезда;
- применение защитных устройств, например, частотного преобразователя.
Важно при регулировании оборотов не потерять в мощности. Применение вышеописанных методов позволит определить вращения без снижения продуктивности. Широкий выбор заводских моделей, но, можно реализовать деталь и самостоятельно.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Использование частотных преобразователей
Для регулировки оборотов электрического двигателя, работающего от сети с напряжением в 220 и 380 Вольт, могут использоваться частотные преобразователи. Высокотехнологичные электронные устройства позволяют благодаря изменению частоты и амплитуды сигнала плавно регулировать частоту вращения электродвигателя.
В основе таких преобразователей лежат мощные полупроводниковые транзисторы с широкоимпульсными модуляторами.
Преобразователи с помощью соответствующего блока управления на микроконтроллере позволяют плавно изменять показатель оборотов двигателя.
Высокотехнологичные преобразователи частоты используются в сложных и нагруженных механизмах. Современные частотные регуляторы имеют сразу несколько степеней защиты, в том числе по нагрузке, показателю тока напряжения и другим характеристикам. Отдельные модели питаются от электросети с однофазным напряжением в 220 Вольт и могут переделывать напряжение в трехфазные 380 Вольт. Использование таких преобразователей позволяет в домашних условиях использовать асинхронные электрические двигатели без применения сложных схем подключения.
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Способы подключения
Прежде чем начать интеграцию регулятора оборотов, необходимо изучить руководство. Там указан тип и механизм работы имеющейся модели. Без этой информации можно допустить ошибку и спровоцировать поломку модуля либо двигателя. Как правило, схема подключения регулятора оборотов не особенно отличается по разновидностям последних, поэтому в руководстве пользователя будет представлен чертеж типовой электроцепи.
Изучив схему интеграции, необходимо понять, как используется метод распиновки. С его помощью определяется количество выводов для полноценного управления имеющейся разновидностью электрического мотора. Далее проводится сопоставление выходных контактов электродвигателя и цветовых обозначений разъемов регулятора. Необходимо подбирать приборы так, чтобы не оставалось неподключенных выходов. Если какой-то контакт останется неиспользуемым, их можно закоротить, чтобы не нарушилась работа мотора. Когда все обозначения совпадут, можно начинать соединение и подключение к энергоснабжению.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
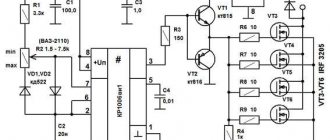
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Преимущества и недостатки
Подведя итог, выделим следующим преимущества CLEBO A3:
- Навигация на базе камеры и гироскопа.
- Построение карты помещения.
- Качество сборки и исполнения.
- Расширенный комплект поставки.
- Несколько рабочих режимов + режим полотера.
- Настройка графика уборки.
- Управление со смартфона и с пульта.
- Работа с голосовыми помощниками.
- Низкий уровень шума.
К минусу iCLEBO A3 можно отнести слабо реализованную функцию влажной уборки, которая представляет собой лишь протирку пола смоченной салфеткой без электронного контроля
Также важно понимать, что управляется прибор через Bluetooth, то есть запустить его удалённо, к примеру, находясь на работе, не выйдет. Ну и стоимость робота-пылесоса в 29900 рублей, будем объективными, доступна не каждому
В остальном нареканий к этой модели нет.
Напоследок рекомендуем посмотреть рейтинг лучших роботов-пылесосов с камерой:
Аналоги:
- Xiaomi Mijia LDS Vacuum Cleaner
- GUTREND SENSE 410
- Roborock S6 Pure
- Ecovacs DeeBot OZMO 900
- HOBOT Legee-688
- iRobot Roomba 960
- Okami U90 Vision
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.